Annuncio pubblicitario
Le auto telecomandate sono divertenti, certo, ma auto-guida le auto robot sono ancora più divertenti. In questo tutorial, costruiremo un robot a quattro ruote che può guidare ed evitare gli ostacoli. Ho acquistato questo kit 4WD completo di AliExpress, ma potresti facilmente acquistare la maggior parte di questi componenti da un negozio di elettronica e metterli insieme da soli.
Consiglio di leggere tutte le istruzioni prima di iniziare, in quanto ciò chiarirà alcune cose che potrebbero essere fonte di confusione al primo tentativo. Inoltre, potrebbe sembrare un progetto molto lungo e avanzato a causa della lunghezza delle istruzioni, ma in realtà è piuttosto semplice. Non c'è bisogno di essere intimiditi: questo è un progetto di livello principiante con il quale puoi ottenere risultati soddisfacenti, e poi sviluppare man mano che impari di più. Non ti piace questo stile di robot? Eccone un po 'di più Robot Arduino 8 robot Arduino che puoi costruire per meno di $ 125 L'Arduino può fare molto, ma lo sapevi che può creare robot a tutti gli effetti? Anche abbastanza economico! Leggi di più potresti facilmente costruire invece.
Ecco cosa abbiamo, dopo aver tolto tutto dalla confezione:

Per iniziare, allegheremo i motori e il ponte H (la scheda che fornisce energia ai motori) nella parte inferiore del telaio. Innanzitutto, collega le quattro staffe metalliche (sono rettangolari, blocchi di metallo forati) a ciascun motore usando due bulloni lunghi e due dadi.

Dovrai assicurarti che siano collegati correttamente, quindi controlla l'immagine qui sotto per assicurarti che il lato del blocco con due fori praticati sia rivolto verso il basso. Si noti che i fili su ciascun motore sono rivolti verso il centro del telaio.

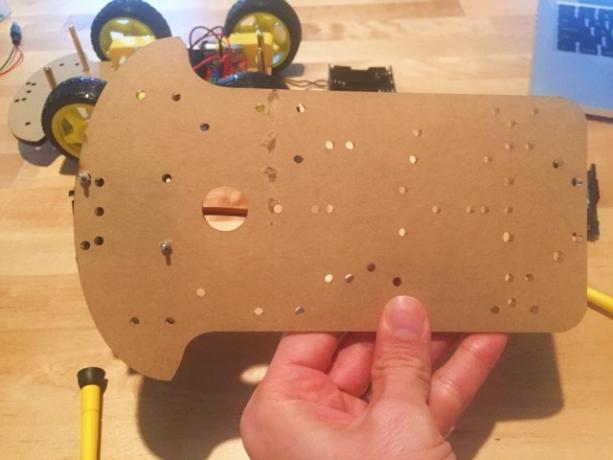
Ora ogni motore può essere fissato al telaio usando due bulloni corti nella parte inferiore di ogni staffa metallica. Ecco una vista della parte inferiore del telaio in modo da poter vedere dove devono essere i bulloni:

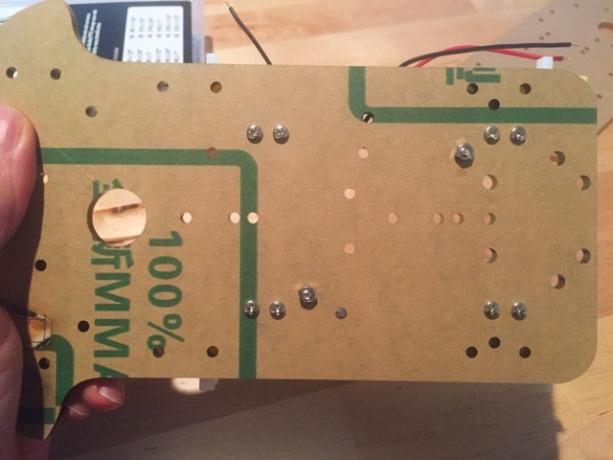
Il prossimo passo è fissare il ponte H (che è la scheda rossa, nel mio kit) al telaio. Potresti voler aspettare che tutti i fili siano collegati al ponte H prima di farlo, ma dipende da te (ho scoperto che è più facile). Una breve nota: nel mio kit mancavano alcuni dispositivi di fissaggio, quindi ho usato del nastro isolante per fissare il ponte. Tuttavia, puoi vedere qui dove sarebbero finiti bulloni e dadi:
Ora che il ponte H è stato collegato, è possibile iniziare a cablare l'alimentatore. Poiché il portabatteria da sei batterie AA viene fornito con un adattatore CC, dovrai tagliare l'estremità (cosa che ho fatto io) o far passare i cavi dei ponticelli alle batterie stesse.

Indipendentemente da come decidi di farlo, eseguirai il filo positivo verso la porta etichettata "VMS" e il filo negativo verso quello etichettato "GND" sul ponte. Avvitare gli elementi di fissaggio e assicurarsi che siano sicuri. Quindi, collegherai i fili del motore. Su entrambi i lati, c'è una serie di due porte; uno è etichettato "MOTORA" e l'altro "MOTORB". Entrambi i fili rossi su ciascun lato entreranno nella porta verde più centrale, ed entrambi i fili neri andranno nella parte più esterna. Questa immagine dovrebbe rendere più chiaro:

Ho scoperto che dovevo rimuovere alcune parti dell'alloggiamento dai fili del motore per farlo funzionare. Ora che hai i motori e l'alimentazione tutti cablati, fai scorrere le ruote sugli alberi di trasmissione del motore e collegare i quattro alberi in rame nelle posizioni mostrate nella figura sotto (ogni albero in rame necessita di un piccolo bullone). Questo robot sta iniziando a prendere forma!

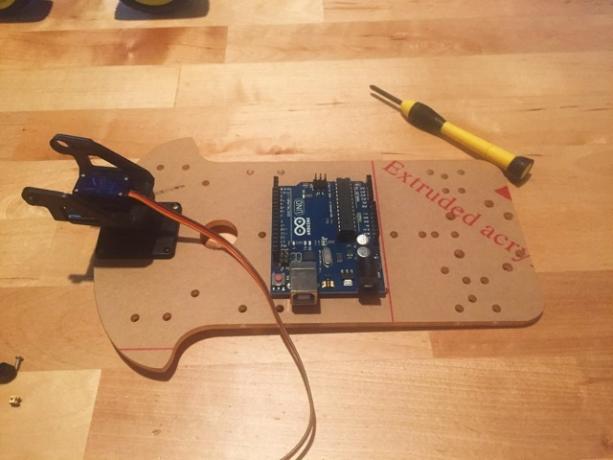
Ora, metti da parte quella parte del telaio e afferra l'altra che siederà in cima. Il prossimo passo è collegare l'Arduino: di nuovo, ho dovuto usare del nastro isolante, ma dovresti essere in grado di proteggere meglio il tuo con alcuni bulloni e dadi.

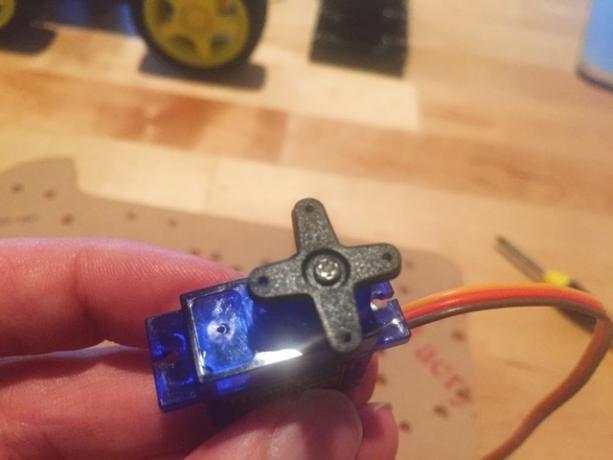
Il passaggio successivo richiede il micro servo, la traversa nera, il supporto del servo (che consiste di tre pezzi di plastica neri) e alcune piccole viti. Utilizzare una delle viti affilate più grandi nel kit per fissare la traversa nera al micro servo:
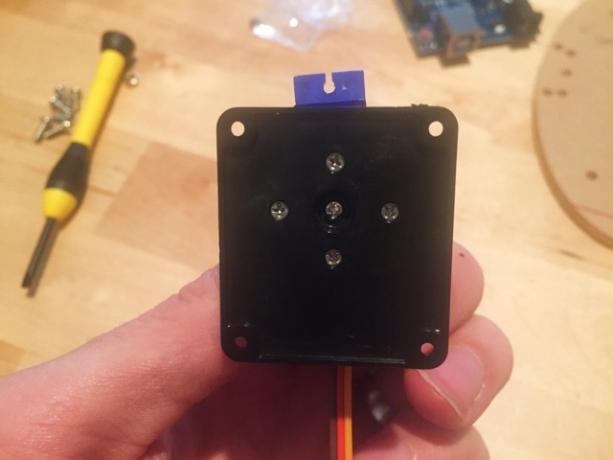
Quindi capovolgere il servo nell'anello di plastica nera del supporto. Assicurarsi che i fili che escono dal servo siano rivolti nella stessa direzione della parte più lunga del supporto (di nuovo, vedere il immagine in basso) e utilizzare quattro piccole viti per fissare la traversa (ci sono quattro fori nel supporto che si allineano con i fori sulla traversa).

Ecco come appare dopo che è stato allegato:
Infine, prendi gli altri due pezzi del supporto del servo e agganciali sul servo (ci sono scanalature nei pezzi laterali che corrispondono alla linguetta di plastica sul servo).

Ora che il supporto del servo è completo, può essere montato sul telaio.
Ecco dove vanno le viti:
È tempo di dare un'occhiata al nostro robot. Collegare il sensore a ultrasuoni al supporto servo utilizzando due fascette.

Se stai lavorando con lo stesso kit di me, avrai ricevuto uno scudo sensore Arduino. Non lo useremo in questa build, ma puoi farlo apparire in cima all'UNO ora, se lo desideri (come ho mostrato nell'immagine qui sotto). Basta allineare i piedini nella parte inferiore dello schermo con le porte I / O sull'Arduino e premere verso il basso per collegarli. Non ti serve in questo momento, ma gli scudi possono tornare utili I 4 migliori scudi Arduino per potenziare i tuoi progettiHai acquistato uno starter kit Arduino, hai seguito tutte le guide di base, ma ora hai colpito un ostacolo - hai bisogno di più bit e bob per realizzare il tuo sogno elettronico. Fortunatamente, se hai ... Leggi di più .

Indipendentemente dal fatto che tu colleghi uno schermo del sensore o meno, ora avrai bisogno di quattro fili per collegare il sensore ad ultrasuoni ad Arduino. Vi sono quattro pin sul sensore, VCC, GND, TRIG ed ECHO. Collegare VCC al pin 5V su Arduino, GND a GND e TRIG ed ECHO ai pin I / O 12 e 13.
Ora prendi la parte inferiore dello chassis e collega sei cavi jumper ai pin I / O del ponte H (sono contrassegnati ENA, IN1, IN2, IN3, IN4 ed ENB). Prendi nota di quali fili di colore sono collegati a quali porte, come dovrai sapere in seguito.

Ora è il momento di iniziare a mettere insieme questa cosa. Afferrare la parte superiore del telaio e posizionarla sulla parte superiore degli alberi di rame collegati alla parte inferiore, quindi tirare i fili collegati al ponte H attraverso il foro al centro del telaio. Collegare i sei fili alle porte I / O come segue:
- Porta da ENA a I / O 11
- Porta da ENB a I / O 10
- Porta da A1 a I / O 5
- Porta da A2 a I / O 6
- Porta da B1 a I / O 4
- Porta da B2 a I / O 3

Ora, utilizzare quattro viti corte per fissare la parte superiore del telaio agli alberi in rame. Posiziona il portabatteria da sei AA sulla parte superiore del telaio (se possibile, avvitalo), collega il porta cellulare da 9 V all'Arduino e questo robot è pronto per il rock!

Bene, quasi pronto per il rock. Non ha ancora abbastanza personalità.

Eccoci. Ora per dargli un cervello. Facciamo un po 'di programmazione.
La prima cosa che faremo è testare per accertarci che il ponte e i motori siano collegati correttamente. Ecco uno schizzo veloce che dirà al bot di avanzare per mezzo secondo, guidare indietro per mezzo secondo, quindi girare a sinistra e a destra:
È un sacco di codice per un semplice test, ma la definizione di tutte queste funzioni semplifica la modifica in seguito. (Grazie mille a Billwaa per il suo post sul blog sull'uso di H-bridge per definire queste funzioni.) Se qualcosa è andato storto, controlla tutti i tuoi collegamenti e che i fili siano collegati ai pin corretti. Se tutto ha funzionato, è tempo di passare al test del sensore. Per utilizzare il sensore a ultrasuoni, ti consigliamo scarica la libreria NewPinge quindi utilizzare Schizzo> Includi libreria> Aggiungi libreria .ZIP ... per caricare la libreria.

Assicurati di vedere l'istruzione include nella parte superiore dello schizzo; se non lo fai, colpisci Schizzo> Includi libreria> NewPing. Una volta fatto, carica il seguente schizzo:
Carica lo schizzo e apri il monitor seriale usando Strumenti> Monitor seriale. Dovresti vedere una sequenza di numeri in rapido aggiornamento. Tieni la mano davanti al sensore e vedi se quel numero cambia. Muovi la mano dentro e fuori e dovresti ottenere una misura di quanto è lontana la tua mano dal sensore.

Se tutto ha funzionato correttamente, è tempo di mettere tutto insieme e far funzionare questa cosa! Ecco il codice per il robot adesso. Come probabilmente puoi dire, questo è fondamentalmente i due schizzi di prova messi insieme con un'istruzione if aggiunta per controllare il comportamento del robot. Gli abbiamo dato un comportamento molto semplice di evitamento degli ostacoli: se rileva qualcosa a meno di quattro pollici di distanza, eseguirà il backup, girerà a sinistra e ricomincerà a muoversi. Ecco un video del bot in azione.
Dai vita al tuo robot
Una volta che questo comportamento funziona correttamente, puoi aggiungere un comportamento più complesso; fai alternare il robot tra girare a sinistra e a destra, oppure scegli a caso; emette un segnale acustico se si avvicina a qualcosa; basta girare, invece di eseguire il backup; sei davvero limitato solo dalla tua immaginazione. Puoi usare qualsiasi cosa nel tuo Starter kit Arduino Cosa c'è nel tuo Starter Kit Arduino? [Principianti di Arduino]Di fronte a una scatola piena di componenti elettronici, è facile essere sopraffatti. Ecco una guida esattamente a ciò che troverai nel tuo kit. Leggi di più per aggiungere più funzionalità. Noterai anche che non abbiamo ancora codificato nulla per il servo: puoi effettivamente far muovere gli "occhi" del tuo robot avanti e indietro. forse usandoli per cercare un percorso invece di fare il backup ogni volta che trova un ostacolo direttamente di fronte.
Facci sapere se decidi di costruire questo robot o un altro e dicci come decidi di personalizzarne il comportamento o l'aspetto. Se hai domande su questo robot, pubblicale nei commenti qui sotto e vedrò se posso aiutarti!
Dann è un consulente di marketing e strategia dei contenuti che aiuta le aziende a generare domanda e lead. Inoltre blog su strategia e content marketing su dannalbright.com.